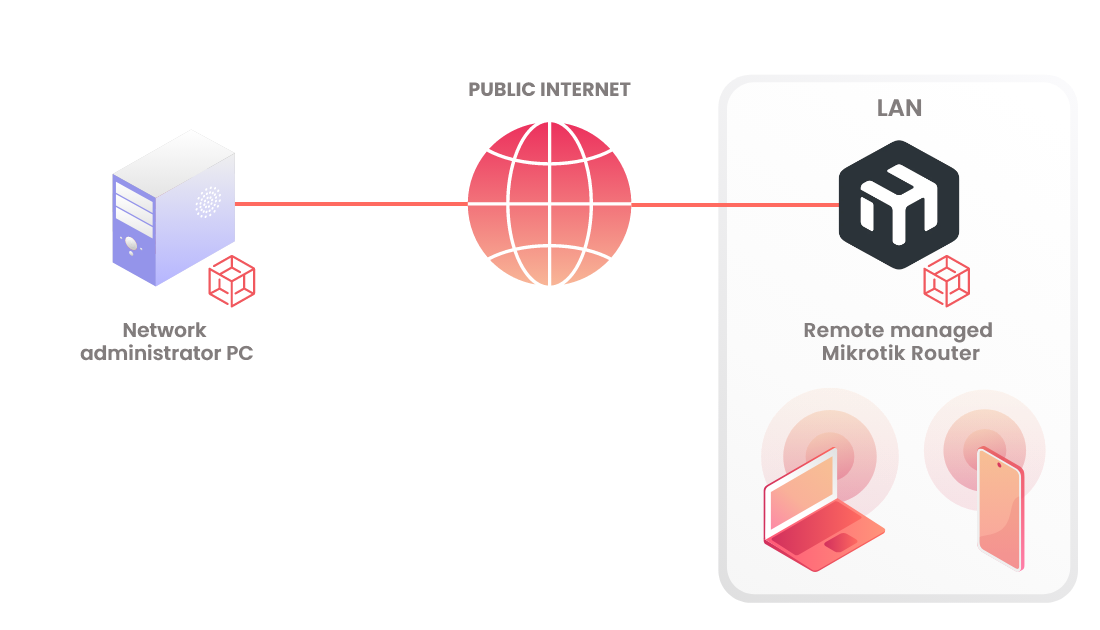
Facing the challenge of remotely accessing Mikrotik routers in a secure and efficient manner? This blog post dives into the technical nuances of setting up Husarnet on a Mikrotik router, leveraging the Mikrotik containers feature. By implementing the guides outlined in this post, you can achieve robust and secure remote access to your Mikrotik router without the need for a public IP address or complex port forwarding configurations, ensuring both ease of management and enhanced security.